简介: 对于这种机械手的使用应该很多人都是有着一些了解的,但是因为这种伺服机械手的类型比较丰富,然后它的很多操作控制方式也是不一样的,这种方式的使用是非常复杂的,尤其是它控
对于这种机械手的使用应该很多人都是有着一些了解的,但是因为这种伺服机械手的类型比较丰富,然后它的很多操作控制方式也是不一样的,这种方式的使用是非常复杂的,尤其是它控制器的控制方式,一般人都是不会的,但是不会没有关系,今天小编就给大家讲述一下:
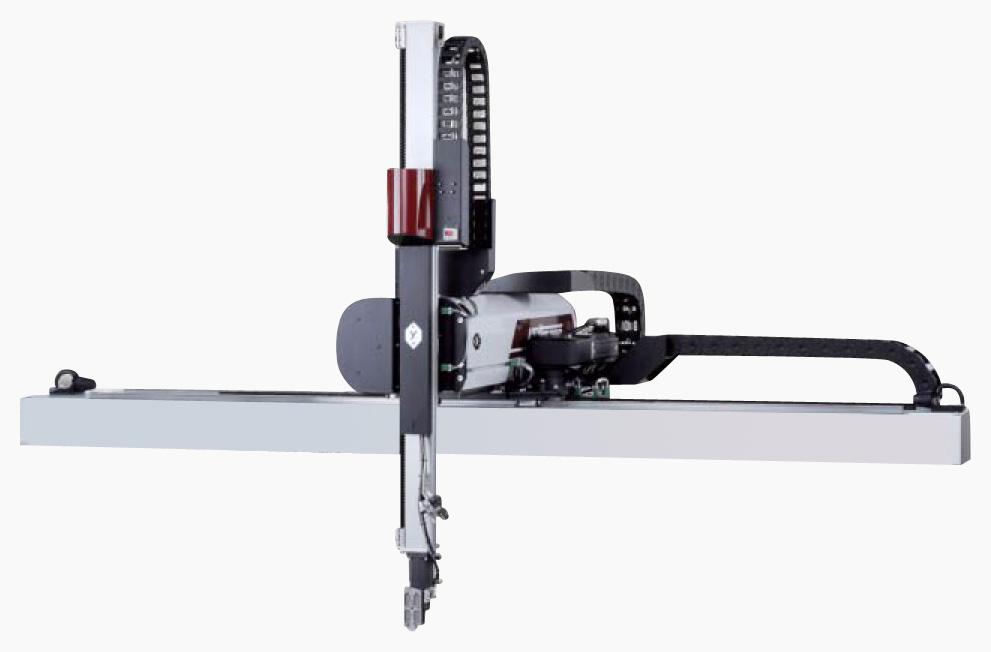
伺服机械手的位置控制,这种模式通常都是通过外部输入的脉冲的频繁来确定转动速度的大小的,通过脉冲的个数来确定转动的角度的,也有些全伺服的机械手的控制器能够通过通讯的机械手控制器直接的对速度和位移进行赋值的,应为位置模式是能够速度和位置都有着很严格的控制的,因此通常对于这种应用于定位装置的。伺服机械手的速度控制,通过模拟量的输入或者是脉冲的频率都是能够进行转动读书月的控制的,然后在尚未控制装饰的外环的控制的时候速度模式也能够进行定位的,但是一定要把电机的位置和信号湖综合是直接负载的位置信号给尚未犯规以及做到运算用,伺服机械手的位置模式也是支持直接负载外环检测位置信号,此时的电机轴端的编码只能够检测到电机转速,位置信号就是由于直接的终负载端的检测装置来提供了。这样的优点在于能够减少中间转动过程中的误差,然后增加了整个系统的定位精度。